Nuclear-Native Autonomy Software
Autonomous surveys and inspections in hazardous spaces.
Salem Robotics automates routine radiological surveys, inspection routes, and auditable reporting so teams can reduce exposure and collect consistent field data with less manual effort. Deploy on your existing robot, or as a turnkey Salem system.
Scoped 1–2 week validation engagements.

01
Plan
02
Execute
03
Report
Autonomy layer for nuclear survey work
Mission planning, robot execution, radiation measurement, and auditable outputs in one operating workflow.
Built by roboticists with experience deploying autonomous systems in U.S. national laboratory and nuclear environments.

Existing robot platforms
Built around systems nuclear operators are already evaluating or deploying.

Compatible survey instruments
Radiation measurement workflows designed around familiar plant hardware.
Autonomy outputs
Route, measurement, and report artifacts that map back to procedures.
Problem
Routine radiological surveys still depend on manual, dose-limited work.
Today, radiation protection technicians walk survey routes with handheld instruments, mark up paper maps, and transcribe results into digital systems afterward. The process is labor-intensive, time-consuming, and constrained by radiation exposure limits, staffing availability, and paperwork burden.
Current Workflow
A skilled technician physically enters the area, measures by hand, and records results after the route is complete.
Manual routes take skilled staff away from higher-value operational work.
Worker dose limits constrain how often surveys can be performed and how quickly issues can be resolved.
Paperwork and fragmented records increase compliance friction and reduce data consistency.
Solution
Salem Robotics turns existing robots into autonomous survey operators.
Our software stack enables robots already deployed in nuclear facilities to navigate survey routes, collect radiation measurements, and generate automated compliance records with optional human oversight when needed.
Salem combines nuclear-specific autonomy, mission execution, telemetry, and data workflows into a system built for safety-critical environments. The platform is designed so plant teams can supervise autonomous survey operations, increase survey frequency, improve consistency, and reduce time spent sending personnel into radiological areas.
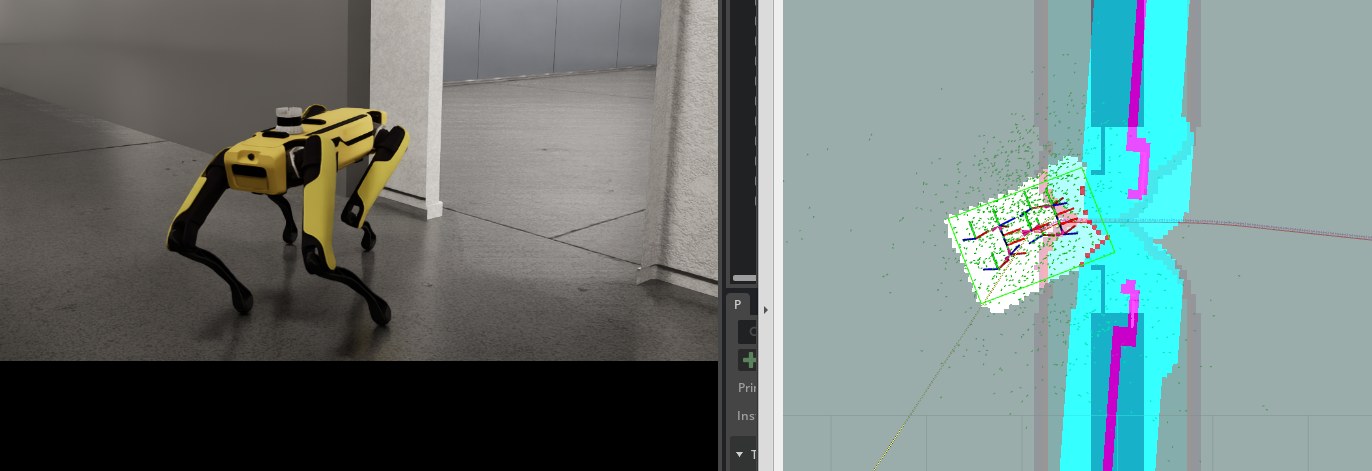
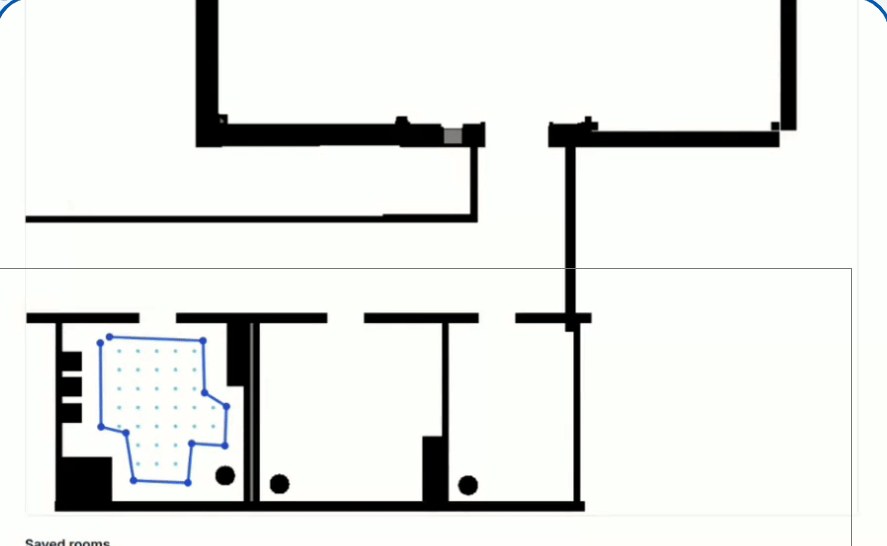
Robot Execution
Survey execution links robot pose, route progress, and map-based measurement points as one mission state.
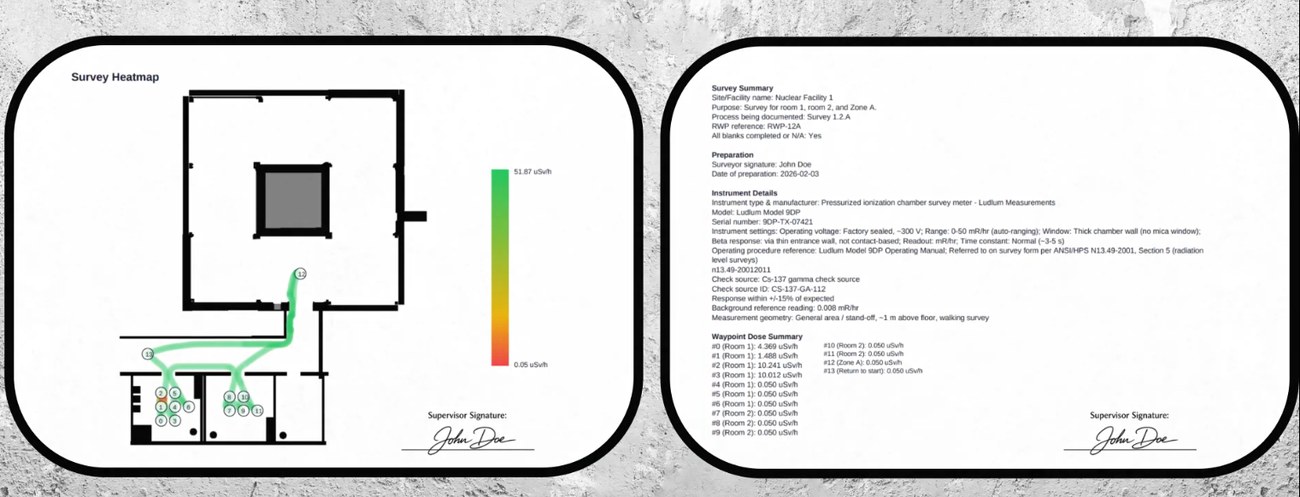
Compliance Output
Measurements are packaged into reviewable records instead of disconnected field notes.
Product
A software platform for autonomous radiological survey operations.
The platform includes robot-side autonomy for navigation and mission execution, plus an operator dashboard for planning, monitoring, and post-mission review. It is hardware-agnostic so sites can extend the value of robotic systems they already own instead of relying on one-off teleoperation workflows.
Key Capabilities
Autonomous survey routes
Radiation data collection
Automated digital reporting
Works with existing robotic systems

Hardware-Agnostic
Extend robotic systems already appearing inside nuclear facilities.
Salem focuses on the autonomy and data layer around fielded robots, not on forcing operators into a single hardware purchase.
Operations
Mission planning and execution
Configure routes, monitor robot status, and review post-mission outputs in one workflow.
Data Integrity
Reporting built for regulated environments
Standardized measurements and digital records create outputs that are time-stamped, spatially linked, and more defensible for regulated operations.
Platform Vision
Nuclear is the proving ground for a broader autonomy platform in hazardous industry.
Salem's long-term goal is to become the autonomous operating system for hazardous site robotics. Nuclear is the right starting point because the operational pain is immediate, the workflows are compliance-driven, and success in one of the most demanding environments creates a strong foundation for expansion into adjacent inspection, monitoring, and industrial autonomy applications.
Field Robotics
Navigation is the start; hazardous facilities need robots that can operate around real doors, valves, instruments, and work cells.
Expansion Path
The same operating layer can support adjacent inspection and monitoring tasks after radiological survey workflows are proven.
Customers
Built for the operators responsible for safety, uptime, and compliance.
Initial deployments are focused on nuclear environments where recurring survey work is operationally necessary, robots are already appearing on site, and exposure reduction matters immediately.
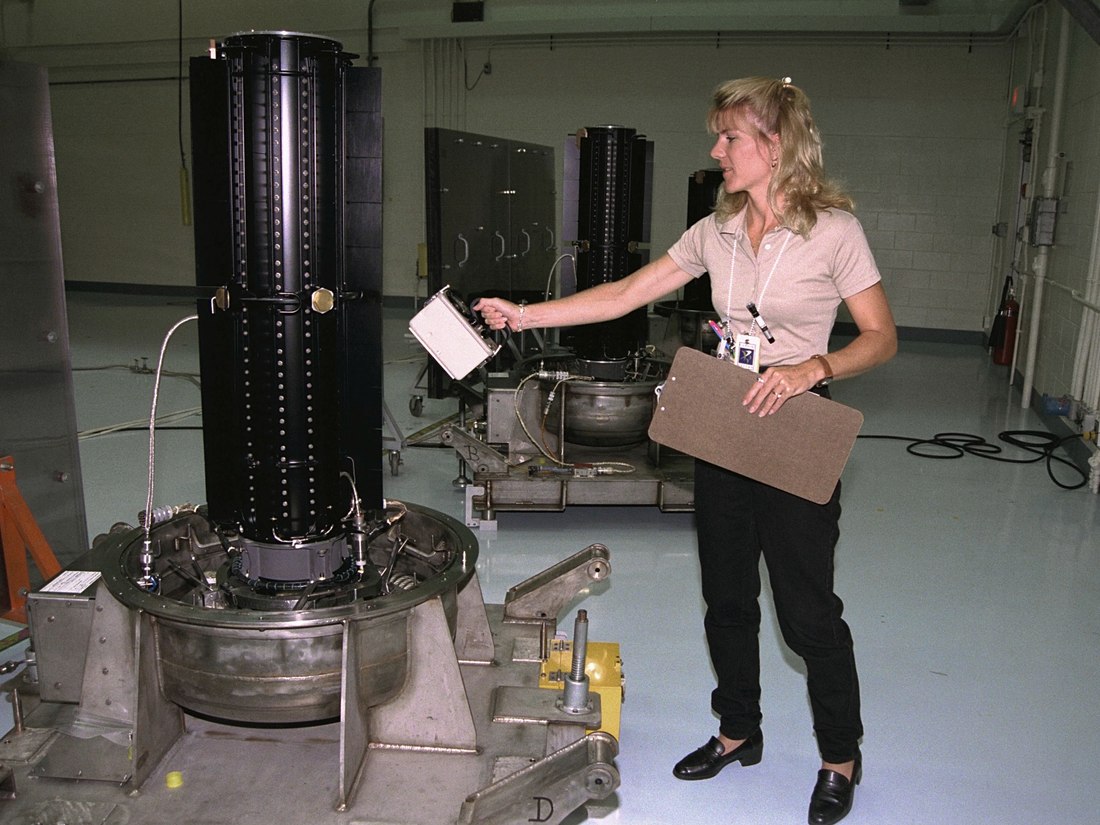
U.S. commercial nuclear power plants
Government nuclear facilities
Decommissioning sites
Oil and gas facilities
CBRN response environments
Space infrastructure operations
Team
Founders with experience in nuclear operations and field robotics.
Salem Robotics is led by a team with more than a decade of combined experience building and deploying robotic survey systems in nuclear environments, supported by advisors with deep robotics and company-building experience.
Co-Founder & CEO
Caleb Horan
Former Ph.D. researcher in UT Austin's Nuclear and Applied Robotics Laboratory with more than eight years of nuclear industry experience, including extended work at Los Alamos National Laboratory on autonomous radiation survey and inspection systems.
Co-Founder & CTO
Janak Panthi
Ph.D. researcher in UT Austin's Nuclear and Applied Robotics Laboratory with experience spanning robotics, product development, and field systems engineering, focused on enabling quadruped robots to perform contact-rich survey tasks in nuclear environments.
Scientific Advisor
Dr. Mitchell Pryor
Research Professor at UT Austin with 20+ years of robotics experience across nuclear, hazardous, energy, and defense environments, including DOE-, DARPA-, NASA-, and U.S. Army-funded field programs.
Business Advisor
Jim Nelson
Serial entrepreneur and executive with 25+ years scaling technology companies, co-founder of Simply Business, UT Austin McCombs faculty member, angel investor, and Austin startup mentor.
Investor Partners

Contact
Speak with Salem Robotics about autonomous survey deployment.
For pilot discussions, investor outreach, or commercial partnerships, contact the team directly.
Salem is actively engaging commercial nuclear operators, government facilities, and partners interested in autonomous survey deployment.